Em Matemática, um sistema de equações lineares (abreviadamente, sistema linear) é um conjunto finito de equações lineares aplicadas num mesmo conjunto, igualmente finito, de variáveis. Por exemplo,
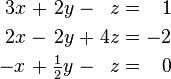
é um sistema de três equações com três variáveis (x, y e z). Uma solução para um sistema linear é uma atribuição de números às variáveis que satisfaz simultaneamente todas as equações do sistema. Uma solução para o sistema acima é dada por

- Algoritmos computacionais são, por encontrar as soluções, uma parte importante da álgebra linear numérica, e desempenham um papel proeminente em engenharia, física, química, ciência da computação e economia. Tais métodos têm uma grande importância para tornar mais eficientes e rápidas as soluções dos sistemas. Pode-se muitas vezes aproximar um sistema de equações não-lineares de um sistema linear (linearização), uma técnica útil ao fazer um modelo matemático
ou simulação computacional de um sistema relativamente complexo. Para tal aproximação, se usa a teoria das sequências.O sistema linear também pode ser conceituado como um sistema de equações do primeiro grau, ou seja, um sistema no qual as equações possuem apenas polinómios em que cada parcela tem apenas uma incógnita. Em outras palavras, num sistema linear, não há potência diferente de um ou zero e tampouco pode haver multiplicação entre incógnitas.Muitas vezes, os coeficientes das equações são números reais ou complexos e as soluções são procuradas no mesmo conjunto de números, mas a teoria e os algoritmos aplicam os coeficientes e soluções em qualquer campo. - EXEMPLO BÁSICO
- O tipo mais simples de sistema linear envolve duas equações e duas variáveis:Um método para resolver tal sistema é do seguinte modo: em primeiro lugar, resolva a equação superior para x em termos de y:Agora substitua essa expressão para x na equação inferior:Isto resulta numa única equação envolvendo apenas a variável
 . Resolvendo, obtemos
. Resolvendo, obtemos  , e voltando para a equação e substituindo y por seu valor (isto é, 1), vem que
, e voltando para a equação e substituindo y por seu valor (isto é, 1), vem que  . Este método se generaliza para sistemas com variáveis adicionais.
. Este método se generaliza para sistemas com variáveis adicionais. - FORMA GERAL
- Um sistema geral de m equações lineares com n incógnitas pode ser escrito como:
 Aqui,
Aqui, são as incógnitas,
são as incógnitas,  são os coeficientes do sistema e
são os coeficientes do sistema e  são os termos constantes.Muitas vezes, os coeficientes e as incógnitas são números reais ou complexos, mas pode-se encontrar também números inteiros e racionais, já que são polinômios e elementos de uma estrutura algébrica abstrata.
são os termos constantes.Muitas vezes, os coeficientes e as incógnitas são números reais ou complexos, mas pode-se encontrar também números inteiros e racionais, já que são polinômios e elementos de uma estrutura algébrica abstrata. - Um ponto de vista extremamente útil é que cada incógnita é um peso para um vetor coluna em uma combinação linear.
 Isso permite que seja exercida toda a linguagem e teoria dos espaços vectoriais (ou, mais geralmente, módulos). Por exemplo: o espaço vectorial gerado é o conjunto de todas as possíveis combinações lineares dos vectores sobre o lado esquerdo, e as equações têm uma solução apenas quando o vector da mão direita se encontra nesse espaço vectorial gerado. Se cada vector desse espaço vectorial gerado tem exactamente uma expressão como uma combinação linear dos vectores dados à esquerda, então qualquer solução é única. De qualquer maneira, o espaço vectorial gerado tem uma base de vectores linearmente independentes que garantem exactamente uma expressão; e o número de vectores nessa base (a sua dimensão) não pode ser maior do que m ou n, mas pode ser menor. Isto é importante porque, se tivermos m vectores independentes, a solução é garantida, independentemente do lado direito, o que não ocorre de outra forma.
Isso permite que seja exercida toda a linguagem e teoria dos espaços vectoriais (ou, mais geralmente, módulos). Por exemplo: o espaço vectorial gerado é o conjunto de todas as possíveis combinações lineares dos vectores sobre o lado esquerdo, e as equações têm uma solução apenas quando o vector da mão direita se encontra nesse espaço vectorial gerado. Se cada vector desse espaço vectorial gerado tem exactamente uma expressão como uma combinação linear dos vectores dados à esquerda, então qualquer solução é única. De qualquer maneira, o espaço vectorial gerado tem uma base de vectores linearmente independentes que garantem exactamente uma expressão; e o número de vectores nessa base (a sua dimensão) não pode ser maior do que m ou n, mas pode ser menor. Isto é importante porque, se tivermos m vectores independentes, a solução é garantida, independentemente do lado direito, o que não ocorre de outra forma. - EQUAÇÃO MATRICIAL
- A equação vectorial é equivalente a uma equação matricial da formaonde A é uma matriz m×n, x é um vector coluna com n elementos e b é um vector coluna com m elementos.Agora, o número de vectores em uma base para o espaço vectorial gerado é expresso como o posto da matriz.
- SOLUÇÃO
- A solução de um sistema linear é a atribuição de valores às variáveris x1, x2, ..., xn de modo a satisfazer ambas equações. O grupo de todas as soluções possíveis é chamado de conjunto-solução.Um sistema linear pode comportar-se em qualquer uma das três formas possíveis:
- Sistema Determinado – SD
É o sistema que possui ao menos uma única solução possível. Esse sistema pode ser chamado de sistema possível e suas equações de equações compatíveis.- Sistema Possível Indeterminado – SID
É o sistema que possui múltiplas soluções.- Sistema Impossível – SI
É o sistema que não admite uma solução, sendo designado por sistema impossível e suas equações como equações incompatíveis. - TÉCNICAS DE RESOLUÇÃO
- Existem vários métodos equivalentes de resolução de sistemas.
Método da substituição
O método da substituição consiste em isolar uma incógnita em qualquer uma das equações, obtendo igualdade com um polinómio. Então deve-se substituir essa mesma incógnita em outra das equações pelo polinómio ao qual ela foi igualada.Método da comparação
Consiste em compararmos as duas equações do sistema, após termos isolado a mesma variável (x ou y) nas duas equações. e as equações ficam mais detalhadas.Fatorizações de matrizes
Os métodos mais utilizados computacionalmente para resolver sistemas lineares envolvem fatorizações de matrizes. O mais conhecido, a eliminação de Gauss, origina afatoração LU. Resolver o sistema Ax=b é equivalente a resolver os sistemas mais simples Ly=b e Ux=6.Regra de Cramer
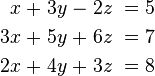
A Regra de Cramer é uma fórmula explícita para a solução de um sistema de equações lineares, com cada variável dada por um quociente de dois determinantes. Por exemplo, a solução para o sistemaé dada pelaPara cada variável, o denominador é a determinante da matriz de coeficientes, enquanto o numerador é o determinante de uma matriz na qual cada coluna foi substituída pelo vetor de termos constantes.Embora a regra de Cramer é importante teoricamente, tem pouco valor prático para grandes matrizes, uma vez que o cálculo de grandes determinantes é um pouco complicado. (Na verdade, grandes determinantes são mais facilmente calculados usando a Eliminação de Gauss.)Além disso, a regra de Cramer tem pobres propriedades numéricas, tornando-a inadequada para resolver até mesmo pequenos sistemas de forma confiável, a menos que as operações forem executadas em aritmética racional com precisão ilimitada. - QUALQUER QUESTÃO NÃO ESQUEÇA DE COMENTAR .... MANDA AS TUAS DICA E SUGESTÕES....






{kind=link}
Sem comentários:
Enviar um comentário
Deixa aqui o teu comentário e ajuda-nos a melhorar: